Point-normal representation
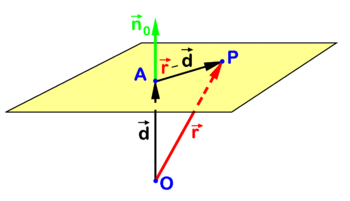
PD Image Fig. 1. Equation for plane. P is arbitary point in plane;  and
and  are collinear.
are collinear. In analytic geometry several closely related algebraic equations are known for a plane in three-dimensional Euclidean space. One such equation is illustrated in figure 1. Point P is an arbitrary point in the plane and O (the origin) is outside the plane. The point A in the plane is chosen such that vector

is orthogonal to the plane. The collinear vector

is a unit (length 1) vector normal (perpendicular) to the plane which is known as the normal of the plane in point A. Note that d is the distance of O to the plane. The following relation holds for an arbitrary point P in the plane

This equation for the plane can be rewritten in terms of coordinates with respect to a Cartesian frame with origin in O. Dropping arrows for component vectors (real triplets) that are written bold, we find

with

and

Conversely, given the following equation for a plane

it is easy to derive the same equation.
Write

It follows that

Hence we find the same equation,

where f , d, and n0 are collinear. The equation may also be written in the following mnemonically convenient form

which is the equation for a plane through a point A perpendicular to  .
.
Three-point representation

PD Image Fig. 2. Plane through points A, B, and C. Figure 2 shows a plane that by definition passes through non-coinciding points A, B, and C that moreover are not on one line. The point P is an arbitrary point in the plane and the reference point O is outside the plane. Referring to figure 2 we introduce the following definitions

Clearly the following two non-collinear vectors belong to the plane

Because a plane (an affine space), with a given fixed point as origin is a 2-dimensional linear space and two non-collinear vectors with "tails" in the origin are linearly independent, it follows that any vector in the plane can be written as a linear combination of these two non-collinear vectors (this is also expressed as: any vector in the plane can be decomposed into components along the two non-collinear vectors). In particular, taking A as origin in the plane,

The real numbers λ and μ specify the direction of  . Hence the following equation for the position vector
. Hence the following equation for the position vector  of the arbitrary point P in the plane:
of the arbitrary point P in the plane:

is known as the point-direction representation of the plane. This representation is equal to the three-point representation

where  ,
,  , and
, and  are the position vectors of the three points that define the plane.
are the position vectors of the three points that define the plane.
Writing for the position vector of the arbitrary point P in the plane

we find that the real triplet (ξ1, ξ2, ξ3) with ξ1 + ξ1 + ξ1 = 1 forms a set of coordinates for P. The numbers {ξ1, ξ2, ξ3 | ξ1+ ξ2+ ξ3 = 1 } are known as the barycentric coordinates of P. It is trivial to go from barycentric coordinates to the "three-point representation",


